New York: Imagine a robot that can unfold itself from a swallowed capsule and crawl across the stomach wall to remove a swallowed button battery or patch a wound. In experiments involving a simulation of the human esophagus and stomach, researchers have demonstrated such a robot steered by external magnetic fields.
"It's really exciting to see our small origami robots doing something with potential important applications to health care," one of the researchers Daniela Rus from Massachusetts Institute of Technology (MIT) said in an official statement.
"For applications inside the body, we need a small, controllable, untethered robot system. It's really difficult to control and place a robot inside the body if the robot is attached to a tether," Rus noted.
The findings are scheduled to be presented at the International Conference on Robotics and Automation in Stockholm, Sweden.
Although the new robot is a successor to one reported at the same conference last year, the design of its body is significantly different.
The robot's envisioned use also dictated a host of structural modifications.
The new robot is based on a biocompatible material.
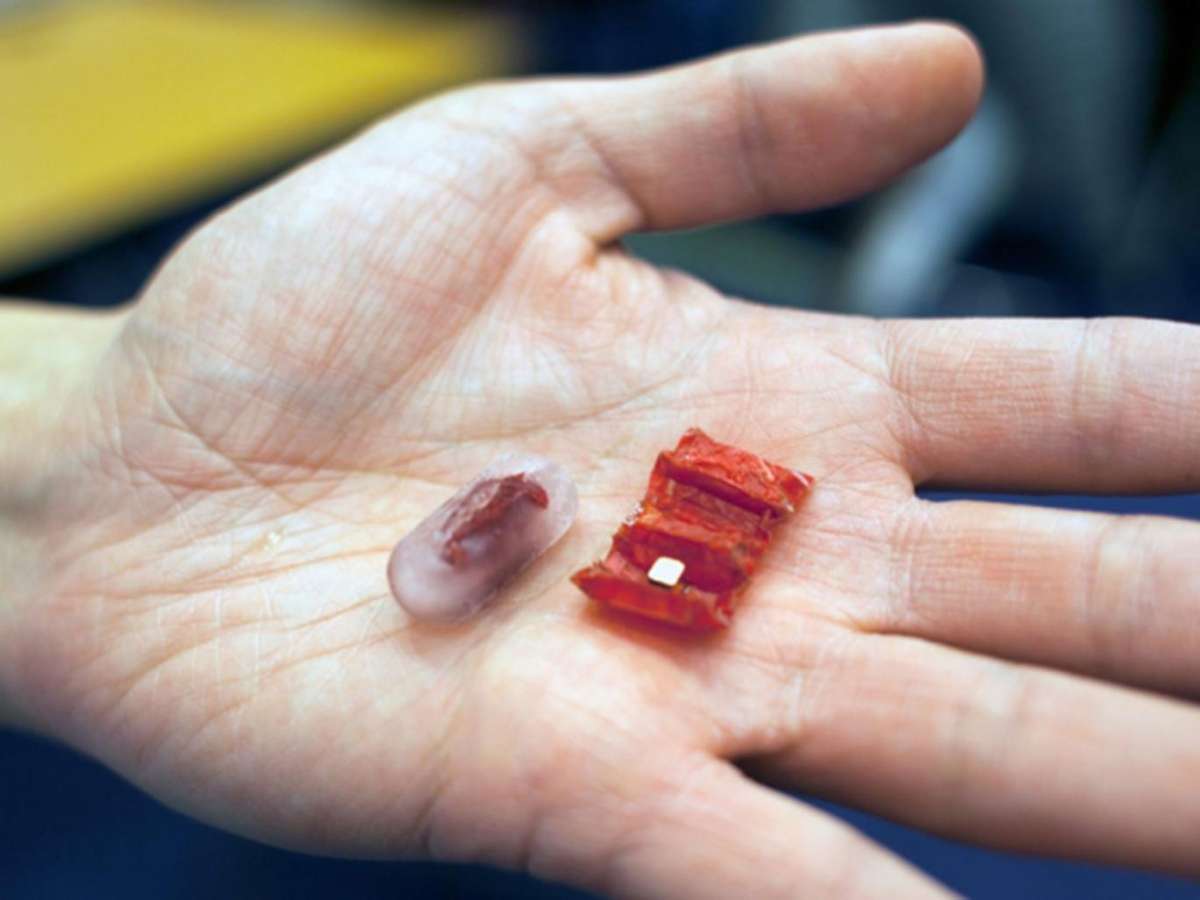
It also had to be possible to compress the robot enough that it could fit inside a capsule for swallowing; similarly, when the capsule dissolved, the forces acting on the robot had to be strong enough to cause it to fully unfold.
Through a design process, the researchers arrived at a rectangular robot with accordion folds perpendicular to its long axis and pinched corners that act as points of traction.
In the centre of one of the forward accordion folds is a permanent magnet that responds to changing magnetic fields outside the body, which control the robot's motion.
The forces applied to the robot are principally rotational. A quick rotation will make it spin in place, but a slower rotation will cause it to pivot around one of its fixed feet.
In the researchers' experiments, the robot used the same magnet to pick up the button battery.
